3D Simulation Systems for Construction of Virtual Worlds
ROS/Gazebo-based simulators
We are interested in the construction of virtual words to be used in monitoring of a flood disaster area by a swarm of robots. For this purpose, we have developed a simulator that runs under Linux (Ubuntu 20.04) with ROS Noetic, Gazebo 9.11. To introduce the flood area, three Gazebo world models have been implemented. In the first model, 2D inundation GIS maps are created in advance and then animated in Gazebo. The second and third models are based on the use of Blender GIS, an open-source 3D graphic application that allows importing geographical maps. In the second model, the animation of the flood is rendered in 3D graphics with the use of Gazebo’s Actor plugin realizing a specified vertical motion of the flood. In the third model, we employed ASV plugin for 3D rendering of simulating waves. It is expected that software developed can be used not only for testing flood monitoring control strategies but also, as practical games, for practicing optimal escape strategies at training centers.
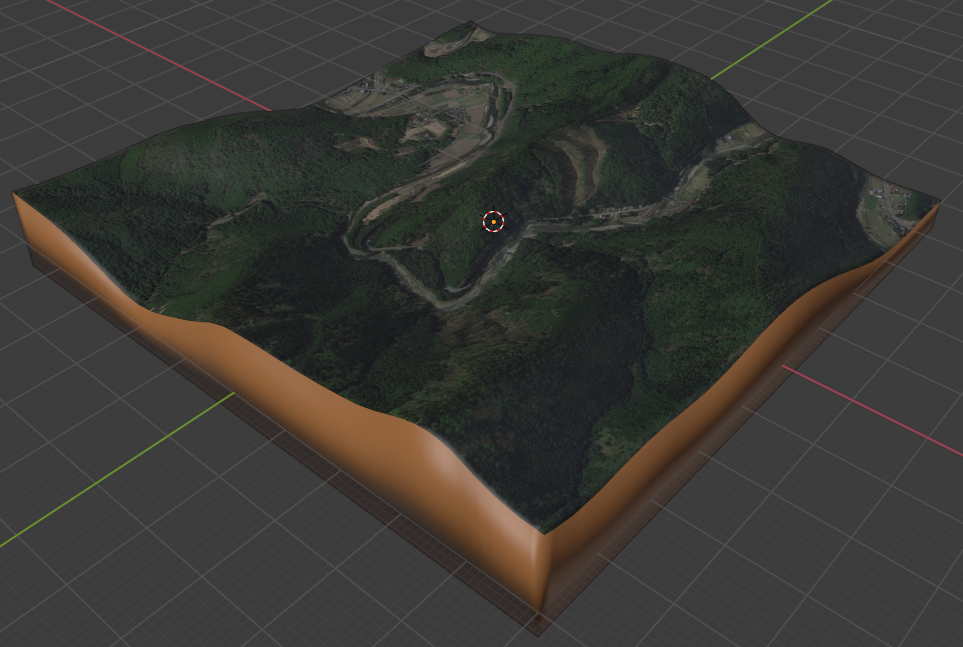 World modelled in Blender GIS | 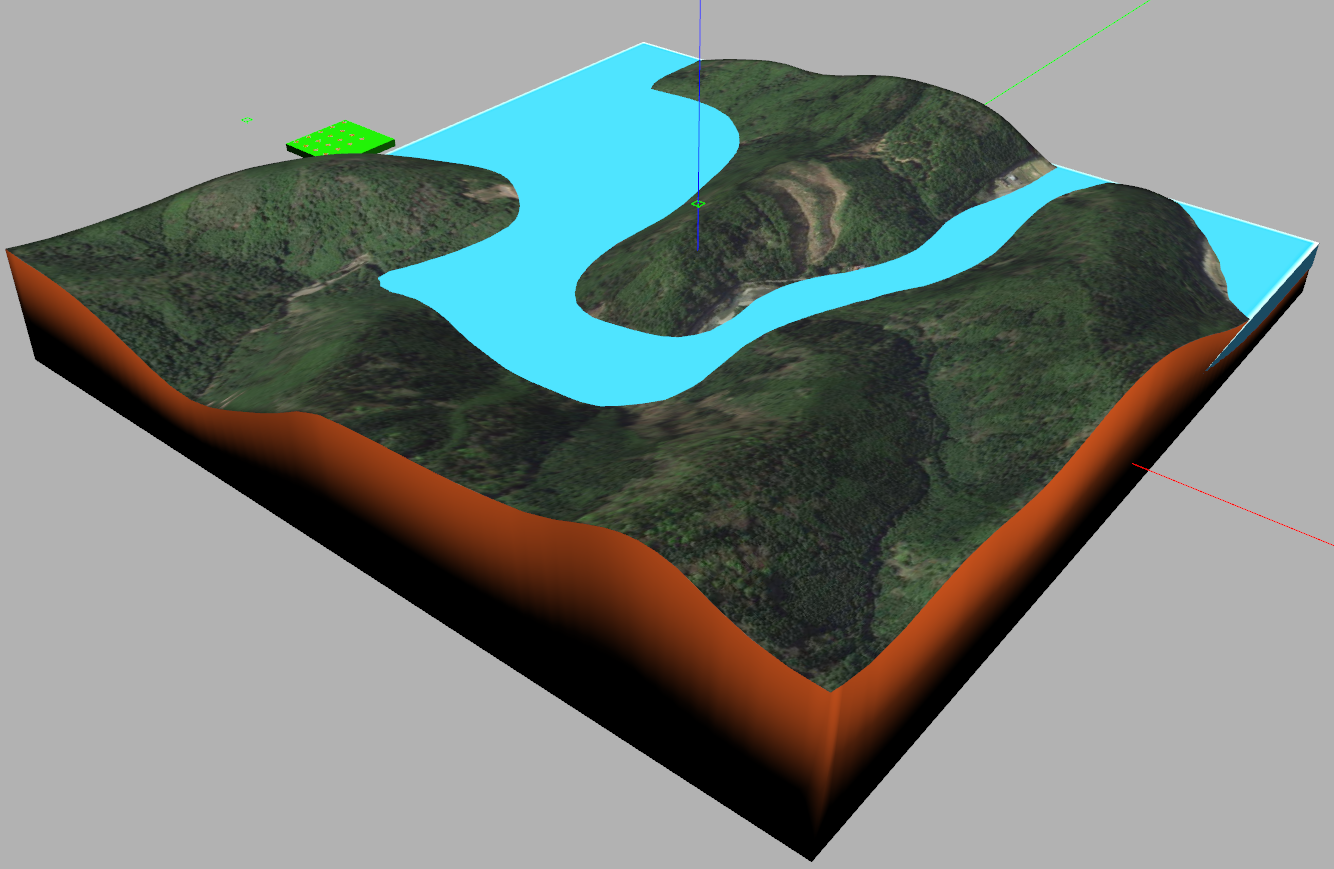 Gazebo world model |
Unity-based game engines for human-robot interaction
The robots of the future will have the ability to predict and accommodate to human movements. We are interested in the design of virtual worlds where a human can interact (in real-time) with external objects and feel them with the use of haptic interfaces. The application of such simulators can be seen from the following perspectives. The first perspective is based on medical applications, computational neuroscience, and robotic rehabilitation. Specifically, such simulators can be used for analysis of human skills in the manipulation of complex objects (for instance, for natural, fast enough reaching movement of a coffee cup with spilling). The second is rooted in human-robot interactions. Once can created a virtual world populated with programmable robots and realize cooperation motion of the human and the virtual, yet physical, robot. Such simulators can be used as a tool for development of cooperative control strategies where the human and the robot accommodate to each other.